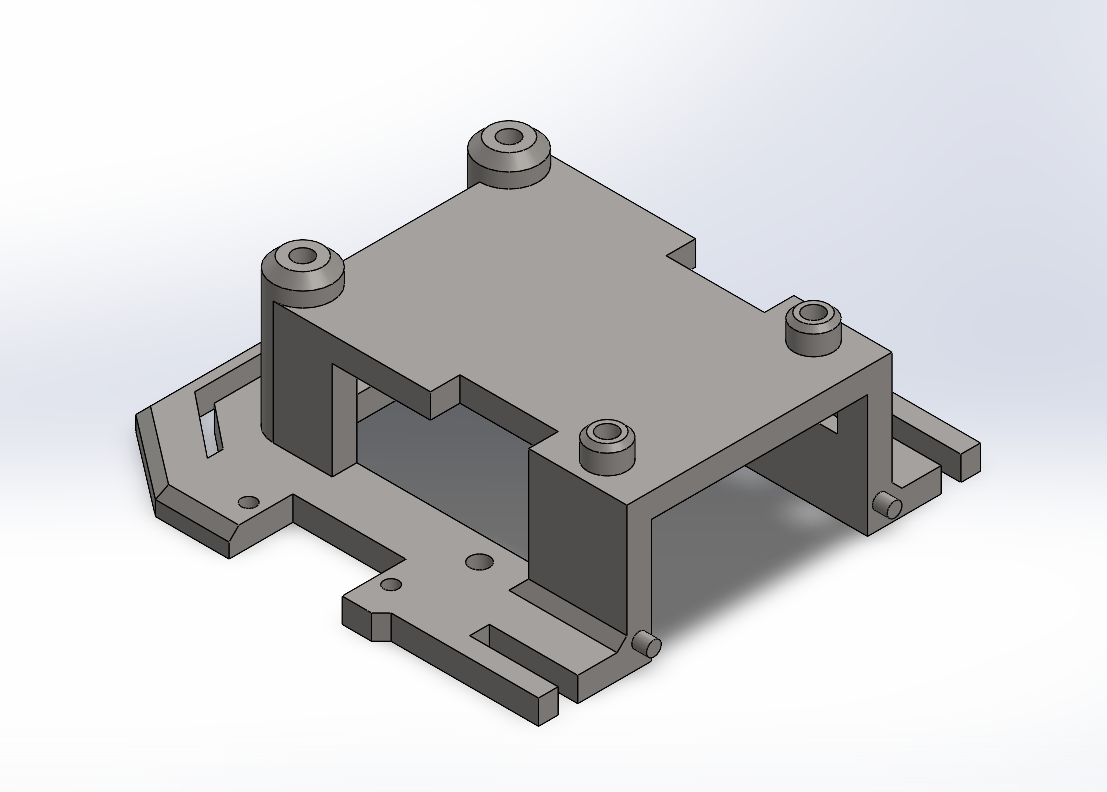
The Four-Foot Spider Robot project focused on creating a complete 3D CAD model of a quadruped robot. I worked with a company in Shanghai to design the full mechanical structure in SolidWorks, building each part accurately and documenting the assembly with technical drawings.
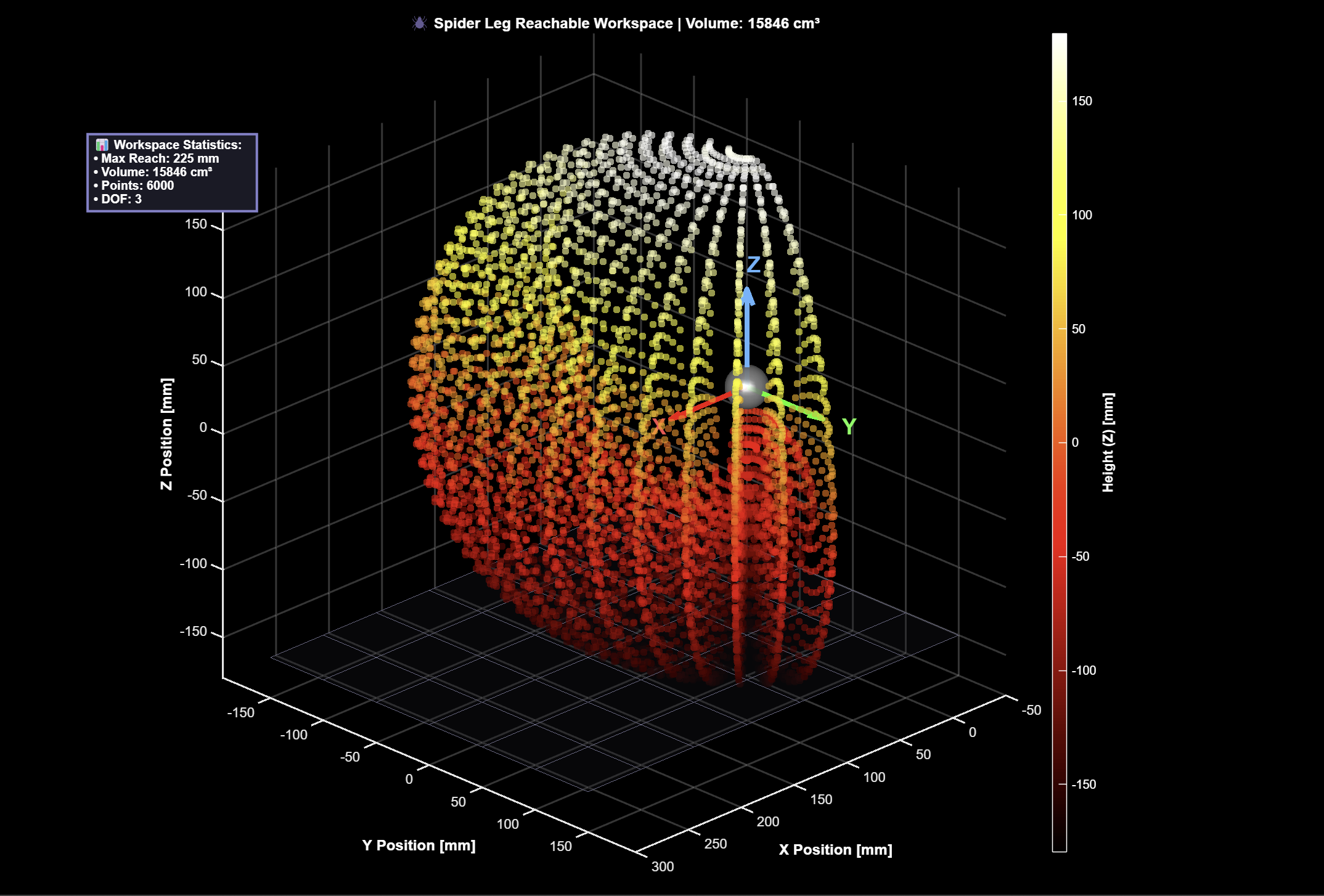
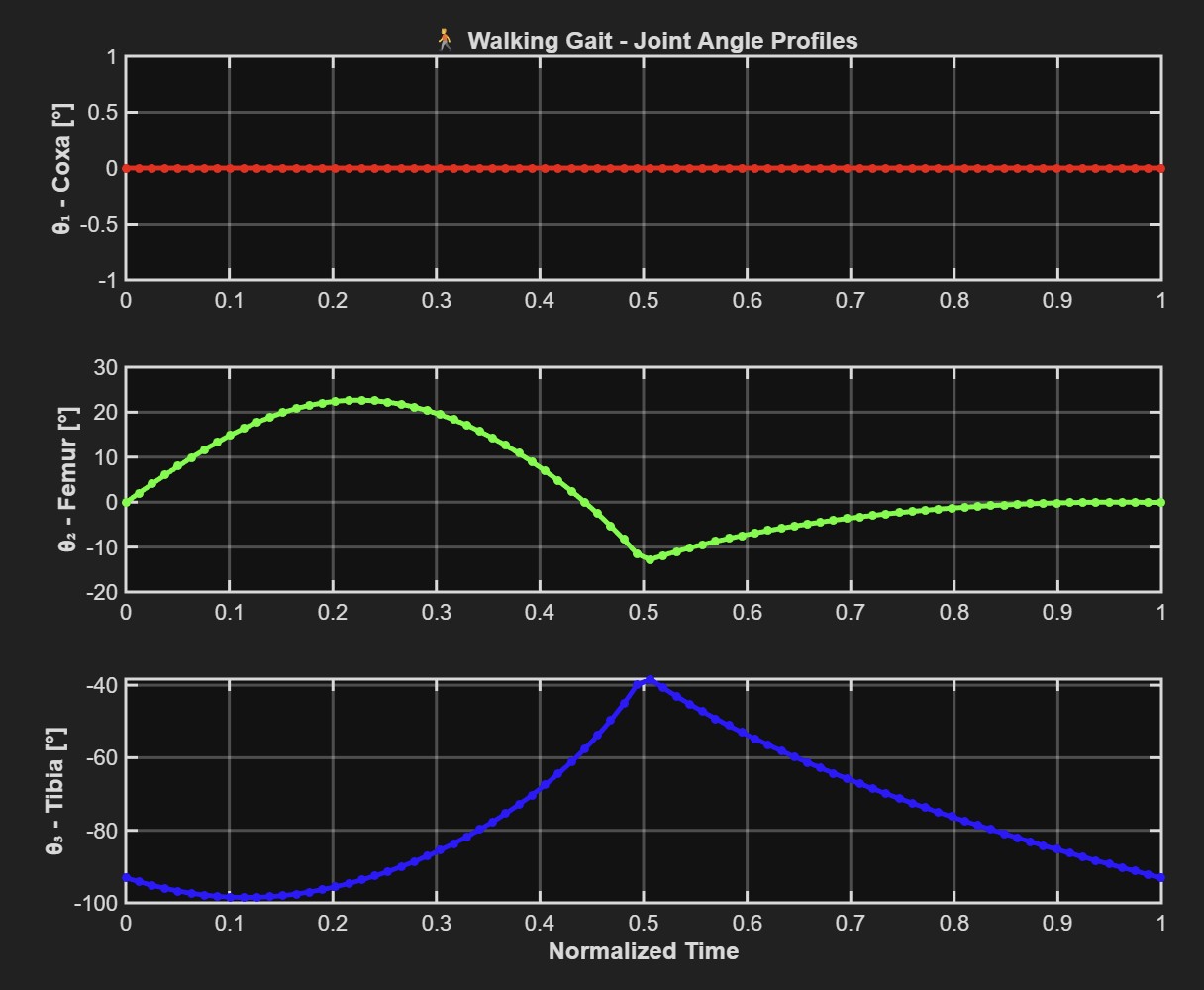
This design uses a 12 degree-of-freedom (DOF) system, with three joints on each leg. This setup would allow the robot to perform movements like walking, turning, and adapting to uneven ground if built in real life. The mechanical layout is inspired by spider-like motion, with attention to stability, weight balance, and efficient structure in the CAD model.